👨🎓 个人简介
我是北京理工大学控制工程专业的二年级硕士研究生,作为自主智能无人系统全国重点实验室的一员,专注于无人机/无人车路径规划、控制及其支撑技术。我于 2023 年获得北京理工大学自动化专业的工学学士学位,并保研到北京理工大学自动化学院。
我的研究方向为无人系统自主导航与控制,具体研究内容是无人机/无人车路径规划与运动控制,并在这些方面具有丰富的动手能力与项目经验。我在国际会议上发表过多篇论文,包括 IEEE ICCA 以及 IEEE RCAR 等。
💪 素质能力
专业背景:研究方向为无人系统自主导航与控制,包括无人机/无人车路径规划与控制等。
开发经验:
- 无人机/无人车软硬件开发经验丰富,熟练使用 ROS 平台、Gazebo 仿真;
- 熟悉 Linux 系统基本操作以及 Git、CMake、VS Code、NeoVim 等项目管理、构建、代码编写工具;
- 熟悉 Hybrid A*、D*、A*等路径规划算法,熟悉 MPC、PID 等控制算法;
- 了解 Acados、OSQP、CasAdi 等数值优化库。
编程语言:熟练使用 C/C++、Python 编程,熟悉 MATLAB 基础语法。
英语水平:四六级已通过,具有良好的英语写作、交流与文献阅读能力。
其他:具有硬件软件动手调试能力,了解 SolidWorks 基础使用。
📖 教育经历
北京理工大学/徐特立英才班(北理工拔尖人才培养特区)
2019.9-2023.6 | 工学学士学位 | 自动化方向
- 学分绩:85.0/100,获得一等、二等学业奖学金
北京理工大学/控制工程(模式识别与智能系统方向)
2023.6-至今 | 工学硕士学位 | 保研
- 学分绩:86.1/100,获得一等、二等学业奖学金
- 获得中国机器人及人工智能大赛一等奖、中国研究生数学建模竞赛三等奖
📁 项目比赛
空地异构平台协同的室内导航与侦测(国家重点研发计划)
🕒2023.09-2025.03 | 开发(状态机设置与路径生成)
技术体系:状态机切换 · Kinodynamic A* · 点云数据处理 · 栅格地图构建
项目描述:针对自然灾害(如地震、火灾)后受损建筑物内部结构未知、环境复杂、通信受限的挑战,设计并实现了一套基于多无人机平台的自主协同探索决策与控制系统。该系统通过机载传感器实时感知环境,在线构建三维地图,并实现全自主决策与轨迹规划,以高效、安全地完成目标区域侦察任务。
个人工作
- 自主状态机设计与实现:负责设计规划子模块的状态机,定义并实现了起飞、路径规划、航迹执行、目标点切换、返航等关键状态及其切换逻辑,确保多机在复杂未知环境下的任务流程鲁棒性与自主性;
- 实时局部建图与全局路径规划:基于机载激光雷达(LIDAR)点云数据,实时构建局部栅格地图。设计并实现了基于 Kinodynamic Astar算法的全局路径规划器,在满足无人机动力学约束(最大速度、加速度)的前提下,快速生成从当前位置到未探索区域目标点的初始无碰撞轨迹。
项目成果:在复杂未知室内环境中,项目整体实现4 架无人机协同作业,多机协同室内定位精度达 8.5cm,构建的三维环境地图重建精度达 4.6cm,满足灾后精细侦察需要。
复杂海况无人艇集群智能协同控制决策方法研究(国家自然科学基金重大项目课题)
🕒2023.09-2025.04 | 开发(任务分配与航迹规划)
技术体系:多无人艇控制决策 · 任务分配 · 匈牙利算法 · 航迹优化
项目描述:在国家海洋强国重大战略需求的牵引下,针对无人艇集群在强干扰(如通信受限、环境噪声)、任务动态多变的复杂海洋环境下、实现多模态知识驱动的实时高效协同控制决策的核心挑战。目标是提升集群在侦察、检测、投送等任务中的整体效能和鲁棒性。
个人工作:
- 设计并实现基于匈牙利算法的集群任务分配决策模块:将无人艇编队位置分配问题抽象为带权二分图最小权匹配问题,权重函数综合量化了编队路线长度与艇间相互干扰程度,实现多目标优化。针对实时性要求(<0.1s),对算法实现进行了计算效率优化,确保在集群规模(20 艘艇)下满足毫秒级响应。
- 设计并实现了基于 Astar 和 B 样条的实时路径规划与航迹优化模块:采用 Astar 搜索算法,在已知或部分已知环境中,为每艘无人艇快速生成当前位置到分配目标点的初始全局无碰撞轨迹;针对无人艇非完整性约束(最小转弯半径)和运动学限制(最大速度、加速度),设计并实现了 B 样条轨迹优化器,平滑轨迹的同时最小化航行时间。
项目成果:在 21 艘无人艇(包含子母艇)集群实艇测试中,基于匈牙利算法的任务分配模块在<0.02 秒内完成全局最优解计算,满足实时性要求;集群协同控制跟踪误差小于 1.6 米;集群信息投递率不低于 94.7%。
中国机器人及人工智能大赛(无人协同系统)(国家级比赛)
🕒2024.3-2024.8 | 🏆全国一等奖 | 无人系统规划
技术亮点:Minimum Snap 轨迹优化 · OpenCV 视觉伺服 · 树莓派嵌入式开发部署
比赛描述:针对地下仓库复杂环境(障碍物、门框、移动目标)的常规巡检需求,设计并实现了一套无人机与地面无人车协同的自主巡检系统。系统挑战核心在于:无人机需要未知/半未知环境中自主决策飞行路径,精确识别移动目标并安全降落;无人车需基于视觉感知自主决策巡线路径。最终目标是在场地中,以最短时间完成无人机起飞、避障、穿门、识别移动无人车二维码、降落的全流程任务。
个人工作
- 无人机时间最优轨迹规划算法设计与实现:采用Minimum Snap 轨迹优化框架,将无人机运动轨迹建模为分段多项式函数,以最小化轨迹加加速度(jerk)为目标函数。同时引入松弛变量,多阶段优化轨迹时间,构建并求解时间最优的轨迹优化问题。
- 无人车视觉巡线逻辑开发与嵌入式部署:基于 C++ OpenCV 获取并处理搭载相机的 RGB 图像,设计并实现了地面黑色轨迹线检测算法;编写了基于视觉反馈的闭环 PID 巡线控制逻辑,实时计算车辆与轨迹线的偏差并生成转向控制指令;将算法部署到树莓派嵌入式平台,实现无人车上电后完全自主启动、持续巡线运行。
比赛成果:在 9 米*5 米的复杂模拟仓库环境中,系统以 37 秒的优异成绩完成全部指定任务(起飞、避障、穿门、识别移动目标二维码、降落),荣获大赛一等奖。
📝 论文发表
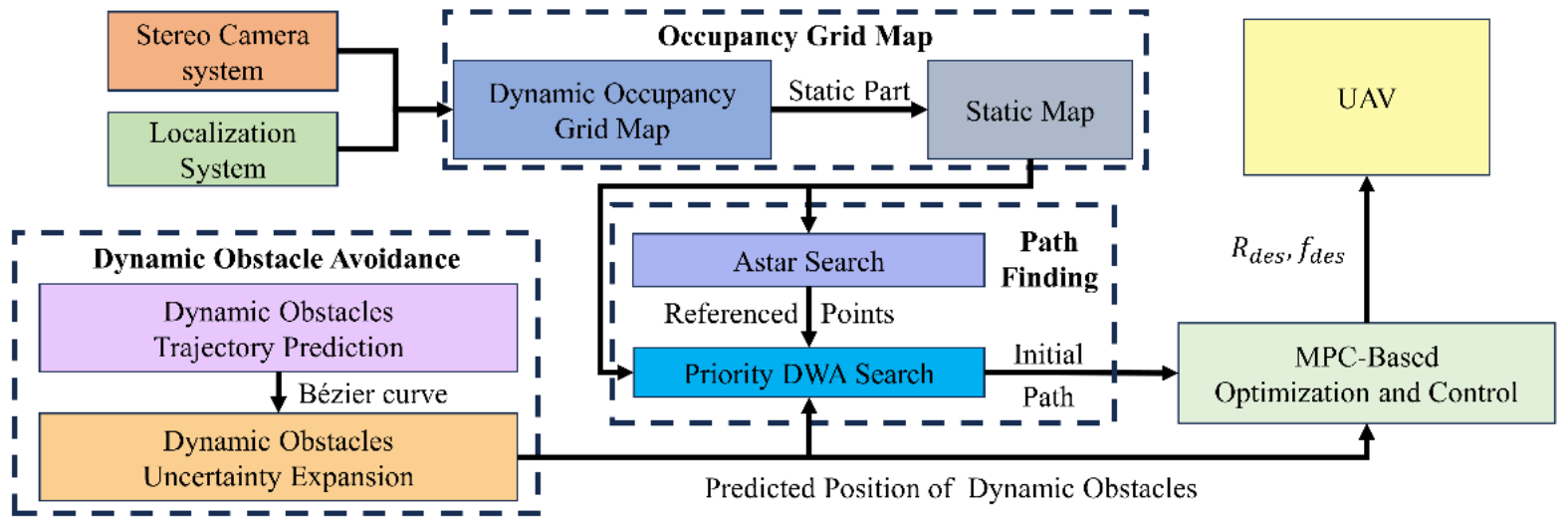
Autonomous UAV Path Planning in Dynamic Environments: A Hybrid Framework of Trajectory Prediction and Priority-Aware DWA
- 设计并开发了结合动态障碍物轨迹预测与优先级感知的动态窗口方法(P-DWA)的混合规划框架,实现了动态环境下安全轨迹搜索。
- 引入动态优先级节点队列和体素采样策略,将路径搜索算法的时间复杂度从指数级优化至线性,显著降低了计算成本。此外设计了不确定信息描述的动态障碍物策略,仅凭位置和时间信息预测其未来运动。
- 实现动态障碍物预测、混合路径规划和无人机控制的集成,无人机动态环境下可执行自主避障与规划运行,集成频率可达100Hz,在仿真和实机环境进行了测试,对比主流规划方法,在动态场景下具备更安全的飞行能力。


ExploreGS: a vision-based low overhead framework for 3D scene reconstruction
- 提出了一种基于快速视觉模型的数据采集方法,可以有效地探索未知环境并生成点云;
- 基于词袋模型设计了一种对选方案,可以减少84-95%的冗余数据;
- 在仿真与实机环境验证了自主重建框架的有效性,同时可以实现无人机上的实时推理。

💼 实习经历
2025.06-2025.08 | 北京卓翼智能科技 | 决策规划算法实习生
工作内容
- 毫米波雷达感知模块驱动开发:深入研究调研了毫米波雷达数据协议与结构,参与编写了基于 UDP 通信的 ROS 驱动包。该驱动包完成了原始数据读取、结构化解析和标准 ROS 消息发布,为后续避障算法开发提供稳定、实时的感知数据支持。
- 设计并实现无人机主动安全避障策略:参与公司自主避障算法研发,针对新手操作风险,创新设计并开发一套融合环境感知的主动安全控制模块。该模块实时解析遥控器指令与传感器数据,在检测到误操作风险(如朝向障碍物飞行)时,自动触发避障或者悬停指令,提升无人机在复杂室内环境下的飞行安全性。
- 构建标准化无人机仿真验证平台:系统调研了主流无人机仿真平台(如 Gazebo、RotorS 等)及接口控制方案,设计并搭建了一套模块化、可扩展的仿真环境。该平台提供统一控制接口与评估标准,高效支持公司探索算法的快速的迭代、性能测试与鲁棒性测试,提升算法研发效率。
🏅 荣誉奖项
- 2024 中国机器人及人工智能大赛一等奖(国家级)
- 2024 中国研究生数学建模竞赛三等奖(国家级)
- 2023 全国大学生课外学术科技作品竞赛一等奖(院校级)
- 2023 “互联网+“大学生创新创业大赛铜奖(院校级)